DeepNav
LiDAR- and UGPS-based underground positioning for real-time mapping, tracking, and operational visibility in GNSS-denied environments
The Gap
Underground mining operates in GNSS-denied environments where GPS is unavailable, limiting accurate positioning, worker safety, fleet coordination, and automation. Existing systems often lack the continuity, precision, and real-time referencing needed for advanced underground applications.
DeepNav combines LiDAR-based scanning with a portable positioning receiver to localize personnel, equipment, and vehicles in real time. It continuously updates tunnel maps with accurate spatial data, improving underground visibility, safety, and operational efficiency.
Operational Visibility & Underground Coordination
Enable precise tracking, navigation, and coordination of personnel, equipment, and vehicles across complex underground environments

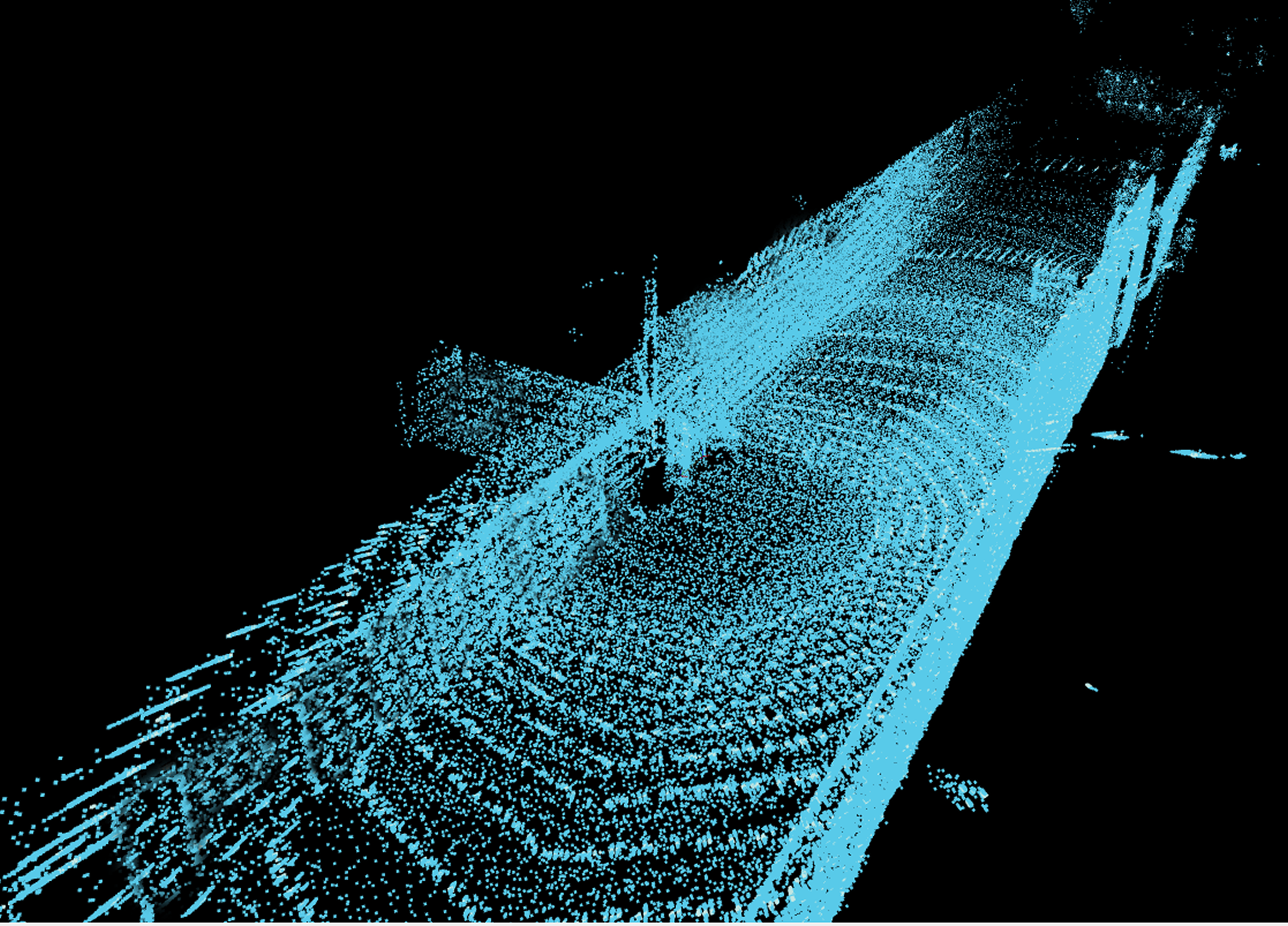
Base Tunnel Mapping
Capture a high-resolution 3D base map using LiDAR scanning, enabling tunnels to be mapped once and used continuously without repeated surveys
Portable Positioning Receiver
Use lightweight portable receivers that can be carried by workers or mounted on rigs and vehicles for flexible deployment underground
Real-Time Position Tracking
Continuously track the location, movement, and orientation of personnel, equipment, and vehicles in real time
Continuous Map Updates
Continuously update the map with live positioning data from portable receivers, enabling real-time tracking without repeated scanning
High-Precision Positioning
Deliver accuracy comparable to surface GPS, enabling precise navigation, coordination, and planning
Advancing Mining Applications
Supports tracking, navigation, and autonomous underground vehicle operations

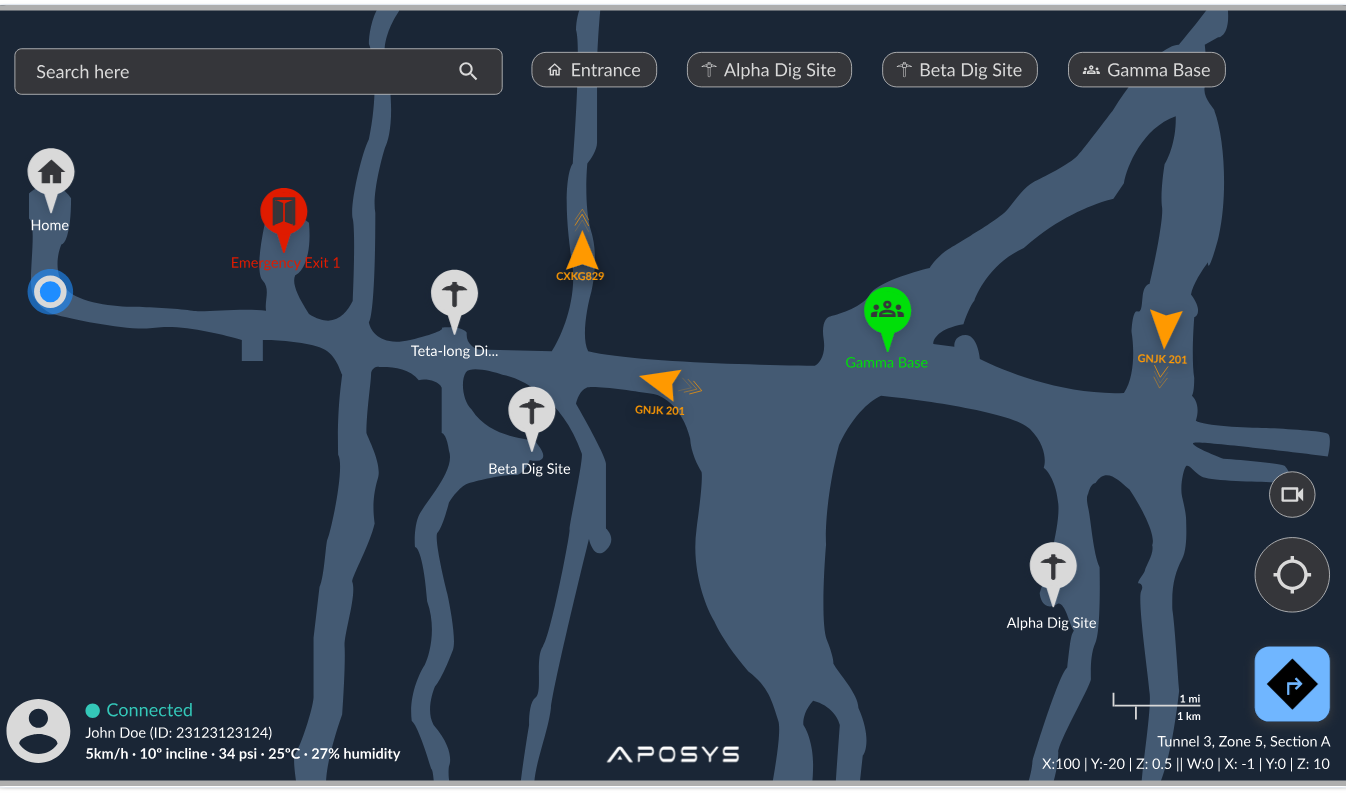
Built for Real-Time Positioning to Enable Mining Applications
View personnel, vehicles, fixed locations, and movement across a continuously updated underground map.
How it works
How DeepNav Works
- 1
Scan underground tunnels using LiDAR to generate a high-resolution 3D base map of the environment
- 2
Deploy portable receivers to capture real-time positioning, movement, and orientation data
- 3
Process positioning data to determine accurate local and/or global coordinates
- 4
Update maps continuously with incoming data to maintain an accurate, real-time view of underground operations
- 5
Apply to underground use cases from tracking, safety, digital mine, and collision avoidance to autonomous driving
Underground Mining Applications
- Personnel, vehicles, sensing data, and materials tracking
- Navigation and routing for fleet management
- Collision avoidance
- Digital mine monitoring and operations
- Autonomous vehicle navigation and routing

Validated in real underground mining environments across varied tunnel conditions
Reduces reliance on manual tracking through real-time positioning and automation
Enables continuous, mine-wide visibility for safer and more efficient operations
Ready to bring reliable positioning underground?
Talk to the ApoSys team about deploying DeepNav for real-time personnel, fleet, and equipment visibility in GNSS-denied operations.